一、答辩总体安排
二、答辩简介
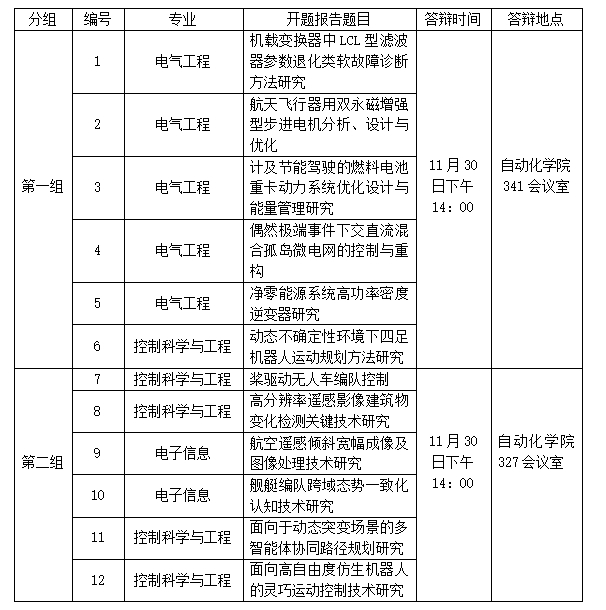
1:机载变换器中LCL型滤波器参数退化类软故障诊断方法研究
本课题以飞机变频交流LCL整流器为研究对象,提出一种基于LCL滤波器谐振特性配置的软故障特征构造方法;并设计无源器件参数退化轨迹下系统故障特征标尺,针对构建的系统故障特征标尺,设计故障特征参数提取方法;提出了基于多次谐波注入法和深度学习的故障诊断识别方法,对滤波器电容电感元件软故障进行解耦识别。
2:航天飞行器用双永磁增强型步进电机分析、设计与优化
面对新一代航天飞行器大容量、高性能的需求,提出一种航天飞行器用双永磁增强型步进电机结构。该电机定子由定子铁芯、永磁体、永磁体导条和电枢绕组组成;转子由转子铁芯组成,具有结构简单、易于散热,可靠性高、转矩密度大等优点。针对双永磁增强型步进电机新型结构,开展拓扑结构研究和磁场耦合分析、解析模型建立、参数敏感性分析及优化设计等,全面研究该电机的工作特性。
3:计及节能驾驶的燃料电池重卡动力系统优化设计与能量管理研究
燃料电池重型卡车的高全生命周期成本阻碍着其快速的商业化进程。能量管理策略对提升车辆经济型,保证车辆性能起着关键作用。动力系统设计和能量管理的协同优化技术,以及速度规划与能量管理的协同优化可以进一步深度优化能量管理性能,降低车辆全生命周期成本。论文将深入研究探索复杂工况下的先进动力系统设计方法,速度规划方案以及能量管理技术。
4:偶然极端事件下交直流混合孤岛微电网的控制与重构
针对我国新型电力系统的迫切需求,本研究聚焦于交直流混合孤岛微电网在极端事件下的控制与重构问题。综合分析现有的微电网控制技术,本文将深入研究微电网中各发电单元与互联转换器的协同运作机制,以及在突发极端事件情况下确保系统稳定和安全运行的策略。研究内容包括异构单元的协调控制,二次瞬态安全控制,以及微电网的快速高效重构方法。通过这些研究,本文旨在提出一系列完善的理论和方法,以确保交直流混合孤岛微电网在各种操作状态下能安全、高效、持续运行,具有重要的科学价值和实际应用意义。
5:净零能源系统高功率密度逆变器研究
该研究聚焦于光伏微电网中高功率密度逆变器的设计和优化,旨在提高其功率密度、效率和控制性能。研究内容包括逆变器拓扑结构研究、基于可解释人工智能的多目标优化设计以及分数阶控制算法的逆变器控制研究。研究计划通过提出创新的高功率密度逆变器拓扑结构,应用多目标优化设计和分数阶控制算法,以满足净零光伏微电网逆变器高功率密度要求。预期成果包括学术论文、发明专利和高功率密度逆变器样机。该研究将为净零光伏微电网中高性能逆变器设计提供新的理论和方法支持。
6:动态不确定性环境下四足机器人运动规划方法研究
四足机器人在地形适应能力和运动灵活性等方面具有优势,被广泛应用于地形勘探、结构检查、无人侦察和安全搜救等实际场景。由于任务需要,四足机器人需要在朝着目标前进的同时,安全地避开静态和动态障碍物。然而,机器人在这些环境中会面临传感器噪声、控制干扰、障碍物状态预测、系统模型不完善等方面的不确定性,使得其无法准确预测系统或环境的未来状态,运动规划的可靠性面临挑战。本选题旨在为四足机器人运动规划提供更具实时性、安全性、鲁棒性的解决方案,使得四足机器人可以在动态不确定性场景下减少潜在的碰撞风险,保证稳定高效的运动能力,安全地完成导航任务,为该领域的技术发展和后续研究提供一定的参考和借鉴。
7:桨驱动无人车编队控制
以地震抢险救灾为背景,针对单模式作业平台和单机执行任所存在的不足,提出了一种具备地面行驶/垂面行驶/空中飞行的桨驱动多模态无人平台及三模态下的编队控制方法。首先,拟建立考虑电机/舵机执行器动态的动力学模型,分析不同模态下的无人平台的动力学特征。其次,针对地面行驶模态,提出一种考虑执行器动态的桨驱动无人平台编队控制方法。再次,针对垂面行驶模态,提出一种考虑输入饱和与状态约束的桨驱动无人平台编队控制方法。然后,针对空中飞行模态,提出一种组合连通拓扑下的固定时间事件触发一致性控制方法。最后,设计桨驱动无人平台并通过实物演示来验证控制方法的有效性。
8:高分辨率遥感影像建筑物变化检测关键技术研究
利用双/多时相高分辨率遥感影像监测土地覆盖/土地利用的动态变化,在土地资源规划、突发灾害评估等重大国防及民生领域能够为人们及时、有针对性地作出决策部署提供关键引导。实现双/多时相高分辨率遥感影像智能解译,快速、准确地提取出感兴趣变化信息,有助于摆脱或极大降低实际应用中对传统目视解译和实地勘察的过度依赖,具有巨大的研究价值和广阔的应用前景。本文结合实际应用需求,研究面向土地资源利用的建筑物分布变化检测(如新建、拆除等)和面向自然灾害应急响应的建筑物损毁评估(如未损毁、严重损毁等)的深度学习解决方案,旨在构建更加智能、准确的建筑物变化检测与损毁评估算法。
9:航空遥感倾斜宽幅成像及图像处理技术研究
航空成像及图像处理技术是航空遥感工程应用中获取高质量数据信息的重要手段之一,现有的多镜头拼接和多靶面拼接的遥感测绘相机通常只能低空飞行获取较高分辨率图像,且采用多航带重叠飞行实现三维地形图信息获取;本课题针对大倾角斜视目标的遥感成像及立体测绘技术需求,提出采用长焦距单镜头大角度扫描成像的倾斜及宽幅成像技术,结合高精度的扫描稳像及光学二维像移复合补偿技术,通过飞行过程中的扫描重访可对大倾角目标的高分辨率遥感影像及三维测绘信息进行获取,为实现遥感影像中高性能目标检测识别提供良好的图像源信息,且通过扫描成像可以实现远高于常规遥感相机的成像效率,提高遥感相机在工程应用的效费比,促进新型航空高分辨率遥感成像技术在工程中的应用。
10:舰艇编队跨域态势一致化认知技术研究
为进一步提升海、空跨域平台对无人集群攻防的态势认知能力,针对现行多源信息认知方法在工程实践中存在的虚假航迹多、目标跟踪稳定性弱以及有态无势等问题,在舰艇编队分布式作战背景下,完成面向海上多目标的跨域异构信息的高效聚能、智能认知技术群研究,实现低观测、高机动、多批次海上目标的稳定跟踪及其作战意图判读,依托外场实测数据回灌完成技术群的功能与性能验证,为分布式架构下多目标多传感器协同认知方向的工程问题提供解决思路。
11:面向于动态突变场景的多智能体协同路径规划研究
本项研究重点面向于自动驾驶与车路协同等带有非合作目标的多智能体场景,采用全局与局部路径规划相结合的思想,对多智能体如何在该类场景下生成协同性强且无冲突路径的问题展开研究。在保证智能体完成任务满足效率需求的同时,预测非合作目标的未来意图与轨迹,并借此最大程度地开发智能体之间的合作与交互模式,使得智能体之间产生集群智能,并为应对具有突变行为的复杂动态场景提出新的解决方案。
12:面向高自由度仿生机器人的灵巧运动控制技术研究
本论文以一类高自由度仿生爬行机器人为研究对象,针对生物的灵巧运动能力尚未在此类机器人上充分体现的问题,从运动的适应性、敏捷性和高效性三个层面出发设计运动控制策略,改进原理样机,并在物理仿真平台和实物样机上对所提出的运动控制策略加以验证。本论文从生物启发的多模态运动模式表示与合成方法、数据驱动的运动参数自适应方法、课程引导的高动态运动技能学习方法和中枢—执行器分层控制系统四个方面开展研究,有望提升高自由度机器人运动能力,推动此类机器人产业应用。









